La historia de la robótica y los robots es una historia de retos y avances tecnológicos, a veces fallidos. A menudo entremezclados con literatura de ciencia ficción e ideas visionarias nunca alcanzadas.
Una ciencia revolucionaria…
Porque la ciencia de los robots es la ciencia del comportamiento y capacidades biológicas, trasvasadas a la tecnología. La ciencia que pretende replicar y mejorar las capacidades de interacción del hombre, como ser más avanzado de la Naturaleza.
Y una paradoja
La paradoja es que aquellas capacidades -que la evolución ha desarrollado a lo largo de millones de años-, se pretenden emular con tecnología que existe apenas hace unos cientos de años, si no décadas. Un reto mayúsculo.

Y he aquí la historia de los robots
Los egipcios y Anubis
Fue en el antiguo Egipto, hace unos 5000 años, cuando se realizaron las primeras criaturas con aspecto robótico. Los egipcios confiaban entonces en los oráculos, señales divinas que creían predecían las cosechas, el clima y prevenían sobre catástrofes o bonanzas.
Estos oráculos eran transmitidos por los sacerdotes del dios Anubis que, para darles más relevancia, manipulaban la boca de la figura del dios, para que se moviera y pareciera que los dictaba éste.
El imperio chino antiguo
Durante la dinastía Zhou Occidental, en el siglo X a.C., se construyeron autómatas mecánicos. El artesano Yan Shi hizo un autómata humanoide que podía cantar y bailar. Se dice que llegó a incluir huesos, músculos y articulaciones en él.
Los griegos y los autómatas
En el primer siglo antes de Cristo, la civilización griega ya había llegado a un nivel de tecnología suficiente para el dominio de las máquinas simples.
Los ingenieros alejandrinos utilizaron esos conocimientos para diseñar mecanismos automáticos. Entre ellos, Herón de Alejandría, fue el más famoso. Desarrolló mecanismos para verter agua automáticamente, abrir las puertas de los templos, o crear criaturas animadas -precursoras de los robots actuales- para entretener a los reyes, a las que se denominó autómatas.
Su Song
El polifacético científico e ingeniero chino Su Song construyó en 1088 un ingenio que fue llamado «El motor cósmico«. Este era un reloj instalado en una torre de 10 metros, que incluía maniquíes mecánicos que daban las horas tocando campanillas y gongs, entre otros dispositivos.
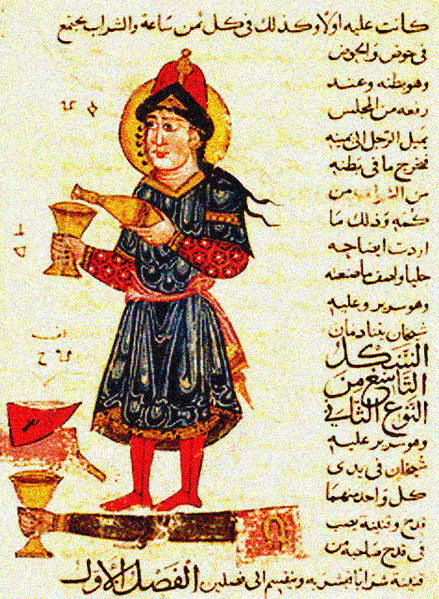
Los árabes
Los bizantinos heredaron de los alejandinos los conocimientos para desarrollar autómatas, y estos a su vez se los pasaron a los árabes.
Entre los ingenieros árabes más conocidos, destaca el polifacético ingeniero kurdo musulmán Al-Jazhari (1136-1206). Construyó, entre otras muchas cosas, varios autómatas movidos por ruedas hidráulicas, con levas de su invención. Entre ellos, un sirviente autómata humanoide que servía agua, té y otras bebidas y una banda de música robótica. Escribió además un tratado sobre cómo construir autómatas.
Europa, Edad Moderna
Seguramente, el primer autómata del que se puede verificar su funcionamiento, es el humanoide diseñado por Leonardo da Vinci -que no sólo es el famoso autor de la Mona Lisa-. Da Vinci escribió un elaborado manual en cuyos dibujos se muestra el diseño de un caballero mecánico con armadura, capaz de ponerse en guardia y mover los brazos, la cabeza y la mandíbula. El año en la que se situa el diseño es 1495, 3 años después del descubrimiento de América por Colón.
Siglo XVIII
En el siglo XVIII, los mecanismos para la construcción de relojes habían sido muy perfeccionados y se realizaban sofisticados diseños. Los ingenieros de la época, como el suizo Pierre Jaquet-Droz, se inspiraron en esos mecanismos, para desarrollar autómatas muy elaborados, que dibujaban o tocaban instrumentos con una precisión extraordinaria.
Los diferentes movimientos se generaban mediante levas de bronce finamente labradas. Si estas se cambiaban, se producían diferentes resultados en el autómata, lo que dio origen a las primeras máquinas programables.
En 1738, el maestro francés Jaques de Vaucanson, fabricante de juguetes, construyó para Luis XV un pato automatizado. Este podía realizar centenares de movimientos, como andar, nadar, agitar las alas, comer, masticar y muchas más.

El Turco, máquina para jugar al ajedrez
El intento más sofisticado de creación automática fue El Turco, un diseño de Wolfgang von Kempelen, inventor húngaro. Esta era una compleja máquina que podía jugar al ajedrez contra un oponente humano, supuestamente por sus propios medios. Sin embargo, en realidad el autómata, aunque de sofisticado diseño, se reveló como un engaño, ya que era controlado desde su interior por un ser humano de baja estatura.
Siglo XIX
El inventor americano Edison desarrolló, utilizando la tecnología patentada de sus fonógrafos, muñecas parlantes, que se intentaron comercializar como juguetes, aunque no tuvieron éxito.
George Moore presentó en 1893 su autómata caminante, que movido por vapor, podía avanzar a una velocidad de 1,5 Km/h.
El declive de los autómatas
Desde finales del siglo XIX hasta el comienzo de la Primera Guerra mundial, se siguieron construyendo autómatas. Pero estos no fueron tan sofisticados como sus predecesores y se utilizaron, principalmente, en espectáculos. Finalmente tras la guerra, la industria de los autómatas desapareció.
Siglo XX
En la Primera Guerra mundial se utilizaron armas controladas remotamente, basadas en la tecnología desarrollada por Nikola Tesla, gran inventor de origen serbocroata. Tesla previamente había desarrollado un robot sumergible, que podía ser controlado remotamente por radio.
En 1914, el español Torres Quevedo presenta en la feria de París de 1914 «El Ajedrecista«. Este era un autómata capaz de realizar un final de rey y torre, contra el rey del oponente humano. Aunque no era muy preciso, y no siempre utilizaba el mínimo número de jugadas, siempre lograba la victoria.
En 1920 se acuña el término «robot«, aparecido en una obra del checo Karel Čapek, y derivado de la palabra checa «robota«, que significa «servidumbre«.
En 1927 se presenta al público el autómata japonés más famoso, el Gakutensoku, que tenía una función diplomática, para una interacción amable con las personas. Se activaba con aire comprimido y podía escribir y levantar los párpados.
En 1939 se presentó en la Exposición Mundial de Nueva York el robot humanoide Elektro, controlado eléctricamente. Con una altura de 2,1 m y un peso de 120 Kg, podía andar siguiendo comandos de voz, hablar unas 700 palabras, fumar, hinchar globos y mover la cabeza y los brazos.

En 1941 y 1942, Isaac Asimov publicó sus célebres tres leyes de la robótica, acuñando además este último término para referirse a la ciencia que estudia y diseña robots y sus implicaciones.
Las tres leyes de la robótica:
1. Un robot no hará daño a un ser humano o, por inacción, permitirá que un ser humano sufra daño.
Isaac Asimov
2. Un robot debe cumplir las órdenes dadas por los seres humanos, a excepción de aquellas que entrasen en conflicto con la primera ley.
3. Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la primera o con la segunda ley.
Aparición de los robots industriales
En 1961 se fabricó el primer robot industrial, el UNIMATE Un brazo robótico activado hidraulicamente, con una memoria almacenada en una bobina magnética de metal. Sus movimientos eran controlados por servomecanismos. y tenía un efector terminal dependiente de la tarea a realizar (soldar, perforar, pintar, etc.).
En las décadas de los 70 y los 80, se desarrolla la Inteligencia Artificial (IA), que pretende aportar los elementos necesarios para convertir un robot en un elemento completamente autónomo, utilizando sensores complejos, como la visión artificial e integrando la planificación inteligente de tareas, creando modelos del entorno en tiempo real.

Y la precisión
En 1975, aparece el robot industrial PUMA (Programmable Universal Machine for Assembly -Máquina Universal Programable para el Ensamblado-), un brazo robótico que incorpora todos los avances realizados en el campo de la Inteligencia Artificial en las universidades MIT y Stanford. Incluye control por microprocesador y emplea motores eléctricos para realizar los movimientos, lo que le confiere una precisión y una velocidad extraordinarias.
Japón
A partir de ese momento, son las compañías japonesas las que toman el control del mercado mundial de robots industriales, produciendo actualmente más del 50% de los robots que se venden en el mundo.
Los robots humanoides
A partir de finales de los 80 y en la década de los 90, los fabricantes japoneses comenzaron a trabajar en el diseño de robots humanoides, y también de robots con aspecto y comportamiento animal, cada vez más sofisticados y con comportamientos más reales.
En 1998, Honda presentó su robot humanoide P3 y en 1999, Sony introdujo AIBO, un perro robótico. En el año 2000 Honda desveló sus avances en robótica con su robot ASIMO, que puede andar por terrenos planos o irregulares, correr, subir escaleras, reconocer caras, comunicarse e interaccionar con su entorno.
